Arama yapınız..

Takip Et
- 26 Temmuz 2016
Nokta Bulutu Verilerinin 3 Boyutlu Kent Modellemesinde Kullanımı
Paylaş

Nokta Bulutu Verilerinin 3 Boyutlu Kent Modellemesinde Kullanımı
Lazer tarayıcılarla nesnelerin (yapıların ya da topografyanın) tümüyle görüntülenebilmesi için farklı noktalardan çok sayıda tarama yapılmaktadır. Lazer tarayıcılarla ölçülecek alanın 3 boyutlu nokta verileri belirlenen aralıklarla çok yüksek hızla ölçülebilir. Tarayıcıların tarama teknikleri satır yada sütun tarama şeklinde olabilir. Her bir taramadan elde edilen nokta bulutunun koordinatları, tarayıcı alet merkezli lokal koordinatlar olarak belirlenmektedir. Nesnelerin 3 boyutlu modelini oluşturmak için nokta bulutlarının, belirlenen referans koordinat sisteminde birleştirilmesi gerekmektedir. Genel olarak ilk taramanın koordinat sistemi referans olarak tercih edilmektedir. İlk taramanın koordinat sistemi referans olarak alınması halinde sonraki taramaların referans koordinat sistemine 3 Boyutlu dönüşümlerinin yapılması gerekir. Nokta bulutlarının birleştirilmesi işlemi jeodezik koordinat sistemine dayalı olarak da yapılabilmektedir.
Nokta bulutlarının bir referans koordinat sisteminde birleştirilmesi için aşağıdaki yöntemler kullanılmaktadır.
a) İteratif en yakın nokta yöntemi (Iterative closest point) yöntemi
b) En küçük karelerle 3 Boyutlu yüzey eşleme (Least square 3D matching) yöntemi
c) Bağımsız model yöntemi (Independent model triangulation)
d) Doğrudan jeodezik koordinatlı ölçmeler (Direct georeferencing)
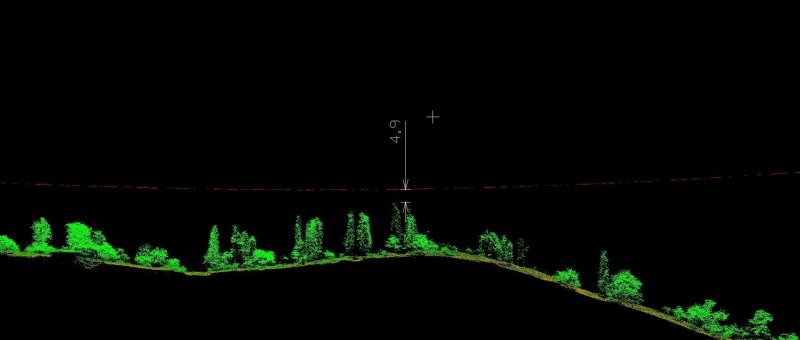
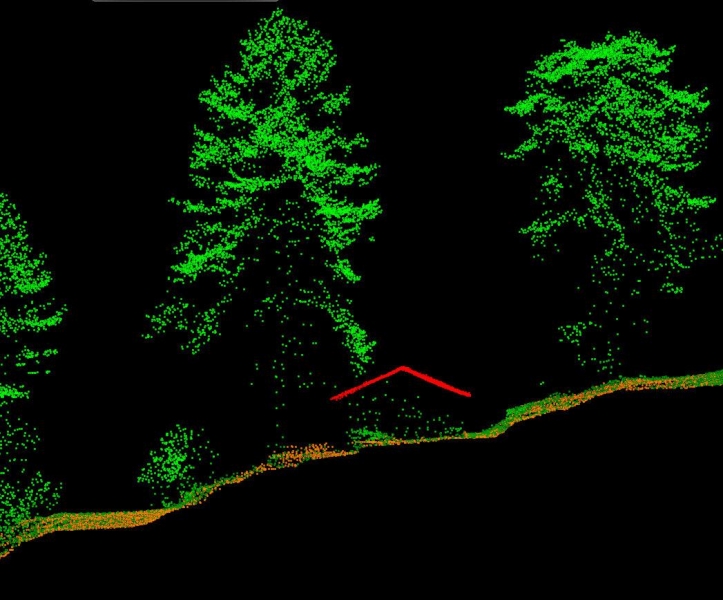
Yalova ili 3 Boyutlu Kent Modeli Projesi Nokta Bulutu Verilerine Yönelik Görseller:


.jpg)